湖北轩润自动化科技有限公司

湖北轩润自动化科技有限公司
专业销售西门子PLC6ES7414-3XM05-0AB0
S7-400自动化系统采用模块化设计。它所具有的模板的扩展和配置功能使其能够按照每个不同的需求灵活组合。一个系统包括:电源模板,处理单元(CPU),各种信号模板(SM),通讯模板(CP),功能模板(FM),接口模板(IM),SIMATIC S5模板
专业销售西门子PLC6ES7414-3XM05-0AB0
专业销售西门子PLC6ES7414-3XM05-0AB0
专业销售西门子PLC6ES7414-3XM05-0AB0

当线电压或负载电流改变肘,直流电源的输出电压也会有所起伏。稳压程度由稳压电路的参数决定,参数是指滤波电容的容量和能量开释的速率。
假如给电源供电的一个相对恒定的电源,那么只需根本的负载稳压。安稳度的巨细一般界说为空载或满载时输出电压的百分比,或电压的改变值。。
CPU通过PC/PPI电缆或插在计算机中CP55111或CP5611通信卡与计算机通信。通过PC/PPI电缆,可以在Windows下实现多主站通信方式。STEP7-Micro/WIN32的用户程序机构简单清晰,通过一个主程序调用子程序或中断程序,还可以通过数据块进行变量的初始化设置。
用户可以用语句表(STL)、梯形图(LAD)和功能块图(FBD)编程,不同的编程语言编制的程序可以相互转换,可以用符号表来定义程序中使用的变量地址对应的符号,是程序便于设计和理解。STEP7-Micro/WIN32为用户提供两套指令集,即SIMATIC指令集(S7-200方式)和标准指令集(IEC方式。
红外线气体检测仪是一种采用的红外气体分析技术,具有高精度、高分辨率、长寿命、易维护等特点的便携式气体检测仪。这种红外线气体检测在众多行业中都有着非常广泛的应用,易燃易爆气体、有毒有害气体浓度的检测历来对安全生产具有重要的意义。其中的红外吸收光谱不仅应用于气体浓度的测量,还广泛应用于从特征吸收来识别不同分子的结构。且灵敏度较高,反应迅速,能在线连续指示,也可组成调节系统。工业上常用的红外线气体检测仪的检测部分由两个并列的结构相同的光学系统组成。
西门子S7-400电源模块6ES7407-0DA02-0AA0
? G120周期通讯报文结构:PROFIdrive规范规定了不同的报文类型。进行循环通讯的报文包含具有特定意义和顺序的数据包。SINAMICS G120变频器具有下表中所列的报文类型:
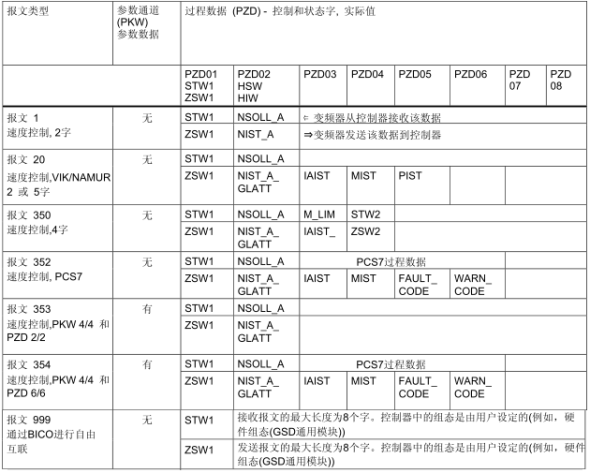
对于报文353和354,软件版本在V3.0及以上的G120/G120D控制单元CU240S/DP/DP-F 才有。 也就是说只有V3.0及以上的控制单元才有PKW结构。
过程数据:
| STW1/2 | 控制字 1/2 |
| ZSW1/2 | 状态字 1/2 |
| NSOLL_A | 速度设定值 |
| NIST_A_GLATT | 速度实际值 |
| IA_IST | 输出电流 |
| MIST | 转矩实际值 |
| PIST | 实际功率 |
| M_LIM | 转矩限幅 |
| FAULT_CODE | 故障代码 |
| WARN_CODE | 报警代码 |
当选定某种报文结构(报文999除外)时,相应的BICO连接将被确定,并且不能修改。如果P0922 = 999,将保持当前的BICO联接,但是可以对其进行更改。
? 控制字1
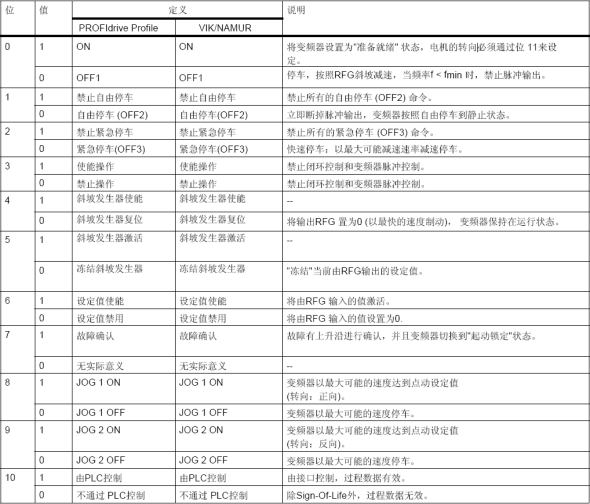

常用控制字:
047E 运行准备
047F 正转启动
注意:如果只发主给定频率,则控制字1的第10位也必须置为1。
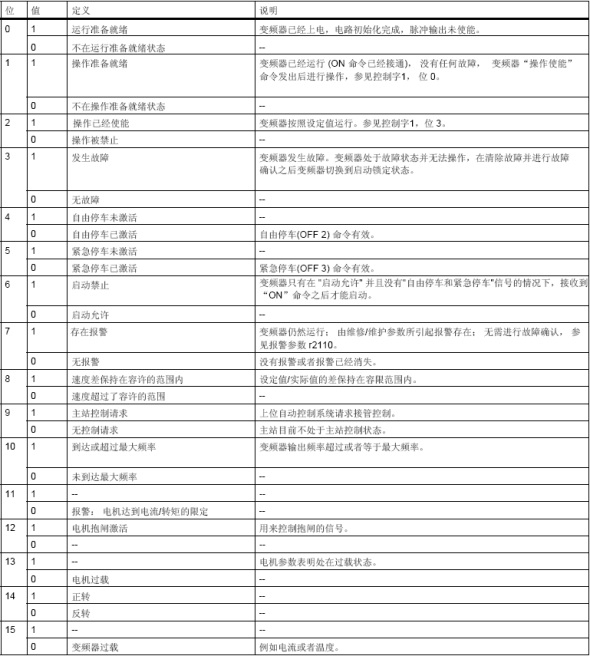
? 状态字1
4 程序举例
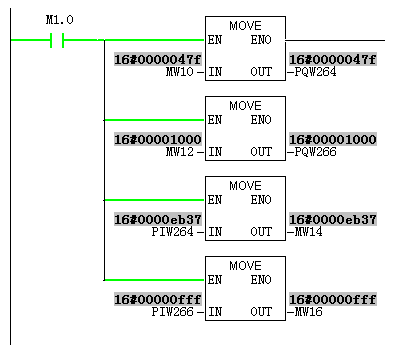
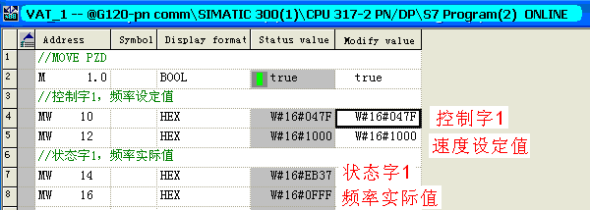
4.1 过程数据PZD-MOVE指令
如果只需要简单地控制变频器的启停和速度,就可以使用MOVE指令。本例中控制字1给047F,变频器运行;速度给定是12.5Hz。
? 程序
? 变量表
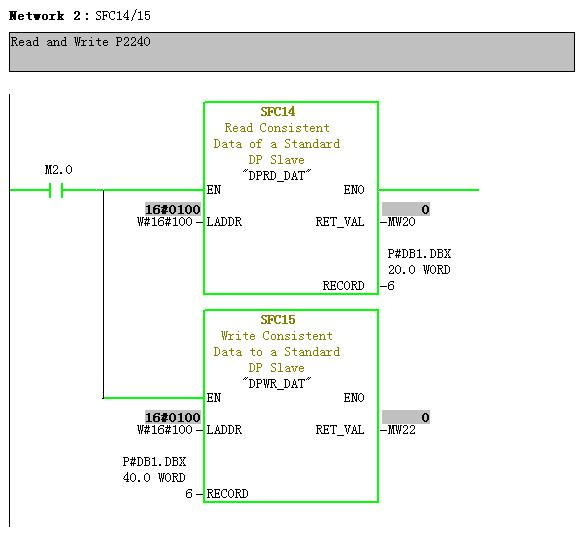
4.2 SFC14/15
如果需要通过参数通道读取或修改变频器的参数,可以使用SFC14/15。本例中通过SFC14/15来读取和修改变频器的参数。
? 程序
? 修改参数P2240.0,变量给定如下:

? 读取参数P2240.1,变量给定如下:

? 从Starter软件中读取P2240参数:

用S7-200进行定位控制、监视和位置校正设计举例
本例用S7-200 CPU 214 DC/DC/DC进行定位控制,并具有位置监视和位置校正
概述
本例相对位置山增量传感器进行位置监视。为了求出传感器信号,将该信号作为CPU 214中的大可处理7kHz信号的高速计数器的输入,这样,就可检测出位置误差。例如,当起一停频率超出时,通过步数丢失可以检测到位置错误。一旦检测出位置误差,就以较低频率进行位置校正。

硬件要求

程序框图

程序和注解
一、初始化
在程序的**个扫描周期((SM0.1=1)设置重要的参数。此外,高速计数器HSC2由外部复位并初始化为A/B计数器。HSC2对检测定位的增量轴编码器信号计数。传感器的A路和B路信号分别作为CPU输入端I1.2和I1.3的输入。旋转方向的选择、按钮锁定、操作模式的选择及定位的过程 (请参考此例概述)。由增量传感器进行定位监视,在输出脉冲结束之后,等待T1时间,以便使连接电机和传感器的轴连接器的扭转振动消失。
二、实际值和设定值的比较
T1到时后,子程序4对实际值和设定值进行比较。如果轴的位置在设定位置的±2步范围内,定位就是正确的。如果实际位置在此目标范围之外,当超过起停频率时,那就会造成电机失步这种情况的发生,此时,一个相应的警告信号就会则Q1.1输出。
三、位置的较正
若定位错误被检测出来,则起动第二等待定时器T2。此后,根据设定值和实际值之间的差值计算出校正的步数。当校正时,电动机频率低于起停频率,以防新的步数丢失。
四、校正取消
如果在两次校正尝试之后还小能达到设定位置,为女全起见,控制将被锁定(M0.2=1 )。只有按下确认按钮I1.4之后,控制才被打开,然后,进行另一个参考点的检测。
T1505系统通过现场接口模板(FIM)连接SIMATIC S7-212编程
本例描述了如何将SIMATIC S7-212(或S7-214)与SIMATIC T1505可编程逻辑控制系统连接起来。主设备(T1505}通过现场接u模板((FIM)向从设备(S7-212发送信息。数据传输的协议为4字(4-Word)简单协议。这样T1505可控制新型SIMATIC PLC及其它支持此协议的设备(例如某些SE &A驭动器)。
通过自山端模式(Freeport Mode),S7-212接收来自主设置的信息,以及向主设备发送信息。由几个中断程序完成从设备的数据处理。

您感兴趣的产品PRODUCTS YOU ARE INTERESTED IN








泵阀商务网 设计制作,未经允许翻录必究 .
请输入账号
请输入密码
请输验证码





