 泵阀商务网
泵阀商务网


详细介绍
一、挡板门电动执行机构,7000Nm电动装置述概
DKJ电子式系列角行程电动执行机构是工业过程测量和控制系统的终端控制装置,它能够将系统的控制信号转换成输出轴的角位移控制阀门截流件的位置或其它调节机构,使被控介质按系统规定状态的工作。
电动执行机构按控制方式分为比例和积分式。比例式执行机构由伺服电机,减速器,具有伺服功能的位置发送器和积分式执行机构组成,它能够将系统的控制信号与关于输出轴位置的反馈信号加以比较(闭环控制)以改变输出轴的行程,使之与输出信号成比例关系。积分式执行机构由伺服电机、减速器及普通位置发送器组成,它能够与电动操作器配合对阀门或其它调节机构实现远方操作。
使用电动执行机构的自动控制系统配用DFD系列电动操作器可以实现控制系统“自动”—“手动”工作状态的无忧动切换。
电动执行机构安全可靠、安装、调试、操作、维修方便,广泛应用在能源、冶金、化工、建材等行业,在工业过程测量和控制系统中发挥重要作用。
二、挡板门电动执行机构,7000Nm电动装置规格型号
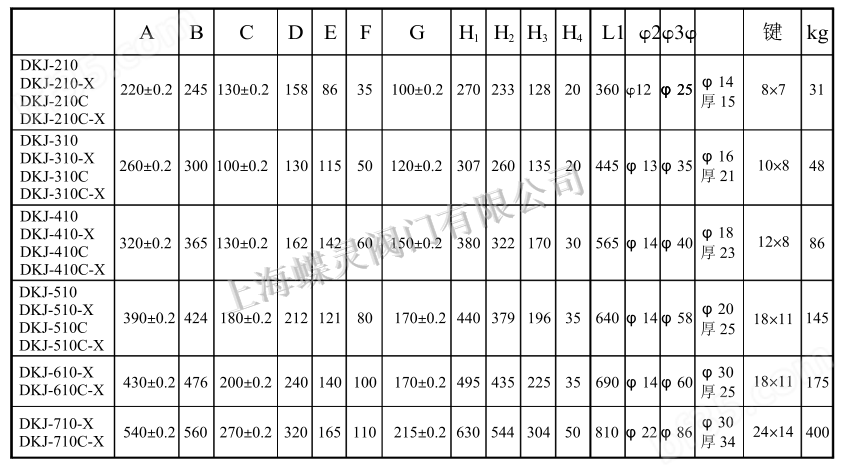
【型号及外型尺寸图】
型号 | 型号 | 力矩 | 行程时间 |
DKJ-210 | DKJ-2100 | 100Nm | 25 |
DKJ-310 | DKJ-3100 | 250Nm | |
DKJ-410 | DKJ-4100 | 600 Nm | |
DKJ-510 | DKJ-5100 | 1600 Nm | |
DKJ-610A | DKJ-6100A | 2500 Nm | 40 |
DKJ-610 | DKJ-6100 | 4000 Nm | 60 |
DKJ-710 | DKJ-7100 | 6000 Nm | 100 |
| |||||
|
动力条件 1.单相交流电 +10%
环境条件 2. ±1% 频率:50Hz -15%; 电压:220V
温度、相对湿度 2.1电动执行机构为室内现场安装仪表。 大气压力:86~106Kpa。 2.2 温度:-10~+55℃。相对湿度:不大于95%。
周围空气中无起腐蚀作用的介质。 2.3
四、主要技术性能
输出轴的额定负载,额定行程及额定行程时间。 1. DKJ电子式系列角行程电动执行机构按照中华人民共和国国家标准GB11922-89《工业过程测量和控制系统用电动执行机构》的规定制造,主要技术性能如下。
电动执行机构的工作信号范围。 2.
参比工作性能 3.基本误差限:不超过额定行程的±2.5%。回差:不大于额定行程的1.5%。额定行程时间误差:不超过额定行程时间的±20%。比例式执行机构 死区:不大于输入量程3%。阻尼特性:不大于3次半周期摆动。积分式执行机构
惰走量:不大于额定行程的1%(额定行程时间为>10~< 25s时);
绝缘电阻: 4.
不小于20MΩ结构与工作原理说明 输入端子——机壳 不小于50MΩ 电源端子——输入端子 不小于50MΩ 电源端子——机壳 在温度为15~35℃,相对湿度为45%~75%时,
电子式电动执行机构是一个以两相伺服电动机为动力源的位置伺服机构,由伺服电动机、减速器、伺放定位模块及位置传感装置等部件组成。
当伺放定位模块中有控制信号输入时,它与来自位置传感器的位置反馈信号进行比较,如果存在信号偏差,伺放定位模块则通过放大导通相应回路以驱动伺服电动机转动使减速器的输出轴朝着减小这一偏差的方向移动(位置传感器不断将输出轴的实际位置转变为位置反馈信号送回伺放定位模块)直到信号偏差小于死区为止,此时输出轴就稳定在与输入信号相对应的位置上。输出轴的行程与输入信号成比例关系。
电动机为鼠笼式两相交流伺服电动机。该电动机转子内阻较大,具有较大的起动转矩和较软的机械特性。在伺服电动机的尾部装有制动装置,能在电动机失电后迅速制动,有效地限制输出轴的惯性惰走及负载反作用力矩的影响,使输出轴准确地停止在确定的位置上,改善系统的稳定性,电动执行机构采用交流电容器做为两相伺服电动机的分相电容,提高了产品的可靠性。
减速器采用一级圆柱齿轮和一级渐开线小齿差行星齿轮转动,具有传动比大、体积小、效率高、噪音小、寿命长等特点。在减速器上设置了手轮装置供就地调整和操作,手轮转动方向与输出轴相同。
伺服电动机安装在减速器上它的后罩上有手柄,可以左右转动进行“电动”与“手动”状态切换,在安装调试及系统或线路出现故障时可断开电源,拉出手轮至“手动”位置(电动机的手柄也扳至“手动”位置)进行就地操作。
在减速器的端盖上配置有两块由T型槽螺钉和螺母紧固的制动块,这就是角行程执行机构的机械限位装置。 除断电进行手动就地操作之外,手轮及电动机手柄务必置于“电动”位置。
电动执行机构的校核:
绝缘电阻校核 3. 执行机构标识的各项内容符合系统及阀门正常工作的需要。 2. 使现场的动力条件、环境条件符合本说明书第三章的规定。 1. 每台电动执行机构在出厂前均已按标准进行了严格检验,考虑到运输及贮存影响,为确保使用安全,请用户在安装使用之前进行如下校核: 4.1紧固件检查 机械校核 4. 用500E兆欧表测量本说明书第四章所述各组导线间及其与机壳间的绝缘电阻,应符合规定。 各紧固件无松动现象,如有松动,务*旋具拧紧。4.2可动零部件检查手轮及电动机后罩上的手柄(以下简称电动机手柄)在“手动”—“电动”位置间切换灵活,在规定位置上能被内部的钢球可靠定位(手轮轴上的钢球压力可用手轮前面的紧定螺钉调整)在“电动”位置手轮空转灵活。 检查完毕,务必将手轮及电动机手柄复位到“电动”。
接插件检查 5.执行机构工作状态的调试 各插头插座安装牢固、接触牢靠,卸下插头,检查各接触对应物无锈蚀、变形等影响接触的缺陷。
2检查无误后 1按接线图3接好线。 3将开关置于手动状态。 通电。
4校整行程开、关方向:操作开时,终端开关顶开后马达应停止。操作关时,终端 开关顶开后马达应停止。如果不是这样,请将终端开关8与9;7与10同时对调。如果马达开关方向与手操方向不符,请将15、16对调;如果马达开关方向与反馈电流增减方向不符,请将位置电位器的12与14对调。
5校整4—20毫安:手动使执行机构向关的方向运转,关终端开关被顶开停止后,
%。 旋转位置电位器使反馈电流为4毫安,显示“0”手动使执行机构向开的方向运转,开终端开关被顶开停止后,调整*电位器
%。一般反复两次。 至20毫安,显示“100”
6将开关置于自动状态,将输出4、5反馈信号接到系统中(或接电流表或短接), 如果发生震荡,请调节死区电位器使之增加死区。(逆时针旋转死区增加)。 在1、2端输入4—20毫安给定信号。分别在4、8、12、16、20毫安处输入信号,观察显示误差,分别显示0、25、50、75、*(误差小于1%)。
7后试验断信号保护,将给定信号或反馈信号断掉,运行中的执行机构应立即停
止。
8观察电制动功能是否干脆且无惰走。
9一般在出厂时执行机构已按正行程调整好,如果现场需要反行程,请将终端开关端子8与9;7与10;位置电位器端子12与14;马达端子15与16 同时对调。
10端子5是电源的负极即公共端。
11特别注意:15、16至马达之间的连线不能串接任何开关。容易造成打火损坏固态继电器。
七、电动执行机构的安装、调整、使用与维护
1.安装
执行机构安装在混凝土或金属骨架的基座上并用地脚螺钉紧固。执行机构的输出臂终端可通过连杆及接头与调节机构连接。
执行机构在出厂时未加润滑油,在正式投入运行前应取下减速器上方的吊环螺钉,从该螺孔内加入润滑脂。
2.工作位置调整 电动执行机构的外形及安装尺寸见图4,接线端子见图5.
松开紧固制动块的螺母,卸下电动机插头,拆下位置发送器罩盖,将手轮及电动机手柄置于“手动”位置,摇动手轮使输出轴转动到对应于位置反馈电流下限的位置(以下简称下限位置)。根据工作状态是正作用还是反作用使一个制动块紧贴住输出臂,紧固好固定制动块的螺母,摇动手轮(正作用时顺时针转动,反作用时逆时针转动),使输出轴转动90°(此位置以下简称上限位置)。使另一个制动块紧贴住输出臂另一侧,紧固好螺母。根据第五章对于凸轮——微动开关的说明,调整凸轮,使其在输出轴位于两极限位置时使相应的微动开关动作,将凸轮轴上的圆螺母紧固好。接好电动机插头,将手轮及电动机手柄置于“电动”位置,接通电源,使输出轴往复旋转,观察调整的正确性。将输出轴转动到下限位置,松开紧固导电塑料电位器的压板上的螺钉,握住电位器使之缓慢转动到位置反馈电流为工作信号范围下*为止,紧固好压板上的螺钉。如有差异可调整印制电路板上的“0%”电位器,接通电动机使输出轴向上限方向转动,位置反馈电流应增加(如位置反馈电流在减少到某一点后突然陡上又减少,则须将导电塑料电位器上的1、3接线头对调并重新调整位置反馈电流下限。当输出轴到达上限后,调整印制线路板上的*电位器,使位置反馈信号为工作信号范围上限。
然后将电机插头插进插座内,使输入信号为工作信号范围下限,输出轴应转动到下限位置,如偏离,可调整导电塑料电位器或印制电路板上的0%电位器;使输入信号为工作范围上限,输出轴应转到到上限位置,如偏离,可调整印制电路板上的*电位器。
使用 3. 调整完毕,装好位置发送器的罩盖。 通电运行前务必仔细检查接线是否正确,手轮及电动机手柄是否置于“电动”位置。电动执行机构有3种操作方式:
a.“自动”操作——接受系统的控制信号自动运行操作。
c.就地操作——断开电流,操作人员转动手轮对机构实行就地操作。 b.“手动”操作(远方控制)——人为给定信号使执行机构实现电动操作。
 泵阀商务网
泵阀商务网